Software Toolkits
NVIDIA Isaac Overview
NVIDIA Isaac is a comprehensive development platform specifically designed for robotics and autonomous systems. It integrates robust hardware and software resources to accelerate the development and deployment of intelligent robots across various domains, including industrial automation, autonomous driving, and consumer applications.
Advantages of NVIDIA Isaac
- Accelerated Development Cycle: By providing pre-built components and realistic simulation environments, Isaac reduces the time and effort needed to develop and test robotics applications. This accelerated prototyping process allows developers to iterate quickly and efficiently.
- High Fidelity Simulation: The platform’s use of advanced physics and rendering technologies ensures that the simulation closely mirrors real-world conditions. This is crucial for testing and validating robotic systems before deployment in real-world scenarios.
- Comprehensive Integration with AI and Data Tools: Isaac integrates seamlessly with NVIDIA’s broader AI ecosystem, including its data generation and processing tools, allowing for robust AI training and deployment capabilities.
- Broad Ecosystem and Community Support: With extensive documentation, forums, and support from NVIDIA, developers have access to a wealth of resources to help them utilize Isaac effectively. This community and ecosystem support fosters innovation and collaboration.
Key Features of NVIDIA Isaac
1. Isaac Sim: Advanced Robotics Simulation
- Realistic Simulation: Isaac Sim leverages the NVIDIA Omniverse platform to create highly accurate, physically-based simulation environments. It supports advanced GPU-enabled physics through NVIDIA PhysX 5 and offers photorealistic rendering using real-time ray and path tracing technologies.
- Modular and Extensible Design: It is built on a modular architecture that supports various applications, such as robot manipulation, navigation, and synthetic data generation. This design allows developers to customize and extend its functionalities to fit specific needs.
- Interoperability and Connectivity: Isaac Sim provides seamless integration with other 3D tools and simulation platforms through OpenUSD and supports ROS (Robot Operating System) and ROS 2. It facilitates easy import and export of robot models and virtual environments, enhancing the workflow for testing and development.

2. Isaac SDK: Comprehensive Robotics Development Toolkit
- Robust SDK Components: The Isaac SDK includes a variety of components for perception, planning, and control, enabling the creation of sophisticated robotics applications. It supports real-time operations and integration with existing robotic systems.
- AI and Perception Modules: It features AI-powered modules for tasks such as 3D scene reconstruction, stereo vision, and advanced sensor fusion, which are crucial for modern robotic perception and decision-making.
- Global Localization and Mapping: The SDK supports global localization techniques, essential for navigating robots in complex and dynamic environments, addressing challenges like the “kidnapped robot problem”.
3. Isaac ROS: Enhancing ROS Capabilities with NVIDIA’s AI and GPU Acceleration
- Accelerated Computing with NITROS: Isaac ROS integrates with NVIDIA’s hardware acceleration to improve the performance of ROS 2 applications. This includes optimized processing pipelines and support for advanced AI models, significantly boosting computation speeds and efficiency.
- Rich Support for Sensors and Perception: Isaac ROS includes extensive support for various sensors, providing tools for visual-inertial odometry, 3D scene reconstruction, and stereo vision. This ensures robots can accurately perceive and interact with their environments.
4. Open Ecosystem Based on ROS Framework
Isaac Perceptor and Isaac Manipulator are reference workflows under the Isaac ROS platform. This platform leverages accelerated computing, physical simulation, and generative AI to advance AI robotics technology, enabling developers to build and deploy automated robots more efficiently.
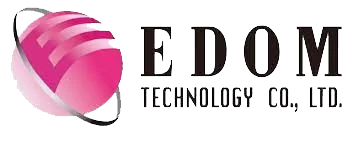
》Isaac Perceptor
Isaac Perceptor is a reference workflow based on Isaac ROS (Robot Operating System), designed specifically for the development of Automated Mobile Robots (AMRs). It utilizes NVIDIA’s accelerated libraries and AI models to enable these robots to perceive, locate, and operate in unstructured environments like warehouses or factories. The workflow supports up to eight synchronized cameras and Inertial Measurement Units (IMUs), providing a highly flexible perception architecture for AMR developers. Its key Features include:
- AI Deep Perception: Uses stereo depth neural networks (DNN) to provide high-density and detailed depth perception.
- Real-time 3D Occupancy Grid: 100 times faster than traditional CPU methods, achieving precise obstacle detection and map generation.
- Accelerated Stereo Visual Odometry: Delivers state-of-the-art real-time localization results, suitable for AMRs operating in fast-moving and changing environments.
》Isaac Manipulator
Isaac Manipulator is another reference workflow based on Isaac ROS, focused on the development of robotic arms (manipulators). It leverages NVIDIA’s accelerated libraries and AI models to help developers build AI-powered robotic arms that can perceive, understand, and interact with their surroundings. Its key Features include:
- cuMotion Path Planning: A GPU-accelerated motion planner that significantly reduces operational cycle times, compatible with the MoveIt 2 open-source motion planning framework.
- FoundationPose: A new unified base model that enables 6D pose estimation and tracking of new objects, providing highly accurate results without the need for fine-tuning.
- SyntheticaDETR: A single-stage object detection model based on DETR, capable of efficiently predicting the location of all objects and trained on both synthetic and real data to achieve high-accuracy object detection and tracking.
5. Isaac Lab: Framework for Robot Learning and AI Training
- Reinforcement and Imitation Learning: Isaac Lab is a framework built on Isaac Sim that simplifies robot learning workflows. It supports reinforcement learning, imitation learning, and motion planning, allowing robots to learn from simulated experiences efficiently.
- Scalable Training on Multi-GPU Systems: It enables the training of AI models across multiple GPUs and nodes, enhancing the ability to generate rich datasets and speeding up the convergence of learning models .
